械設(shè)備有限公司")
動(dòng)平衡機(jī)原理
發(fā)布時(shí)間:
2024-07-03 17:37
首臺(tái)平衡機(jī)的出現(xiàn)乞今已經(jīng)上百年的歷史。而平衡技術(shù)的發(fā)展關(guān)鍵還是近四十年的事。它與科技進(jìn)步的發(fā)展緊密關(guān)連。中國(guó)動(dòng)平衡方法論和設(shè)備的研究及新品的開發(fā)都是50年代開始的。
設(shè)備中繞軸線轉(zhuǎn)動(dòng)的零配件,稱之為設(shè)備的轉(zhuǎn)子。假如1個(gè)轉(zhuǎn)子的質(zhì)量占比均勻,制作和安裝都達(dá)標(biāo),則運(yùn)轉(zhuǎn)是平衡的。期望狀況下,其對(duì)軸承的壓力,除重力以外別其余的力,即與轉(zhuǎn)子不旋轉(zhuǎn)時(shí)相同,只有靜壓力。這類轉(zhuǎn)動(dòng)與不轉(zhuǎn)動(dòng)時(shí)對(duì)軸承都只有靜壓力的轉(zhuǎn)子,稱之為平衡的轉(zhuǎn)子。假如轉(zhuǎn)子在轉(zhuǎn)動(dòng)時(shí)對(duì)軸承除有靜壓力外還額外有動(dòng)壓力,則稱作不平衡的轉(zhuǎn)子。
從牛頓運(yùn)動(dòng)定律了解,一切物體在勻速轉(zhuǎn)動(dòng)時(shí),轉(zhuǎn)動(dòng)體內(nèi)每個(gè)質(zhì)點(diǎn),都是將產(chǎn)離心慣性力,通稱離心力,下圖一所示,盤狀轉(zhuǎn)子,轉(zhuǎn)子要以角速度 ω 作勻速運(yùn)動(dòng),則轉(zhuǎn)子體內(nèi)任意質(zhì)點(diǎn)都將造成離心力 F ,則離心力 F=mrω2, 這無(wú)數(shù)個(gè)離心力構(gòu)成1個(gè)慣性力系功效在軸承上,產(chǎn)生轉(zhuǎn)子對(duì)軸承的動(dòng)壓力,其大小則決定于轉(zhuǎn)子質(zhì)量的占比狀況。假如轉(zhuǎn)子的質(zhì)量對(duì)轉(zhuǎn)軸對(duì)稱占比,則動(dòng)壓力為零,即各質(zhì)量的離心力相互之間平衡。不然將產(chǎn)生動(dòng)壓力,特別是在在高速運(yùn)轉(zhuǎn)時(shí)動(dòng)壓力是挺大的。因而,對(duì)旋轉(zhuǎn)體,非常是高速旋轉(zhuǎn)體開展動(dòng)平衡校正是務(wù)必的。

近些年,很多機(jī)械行業(yè)都會(huì)迫不得已接受著殘酷的市場(chǎng)競(jìng)爭(zhēng),非常是 WTO 的進(jìn)入,這不是內(nèi)憂外患。價(jià)格競(jìng)爭(zhēng)、技術(shù)戰(zhàn)一場(chǎng)接著一場(chǎng),促使諸多公司心身疲倦,怨聲載道。在猛烈的市場(chǎng)競(jìng)爭(zhēng)環(huán)鏡下,提升產(chǎn)品品質(zhì)變成致勝的有力武器,而動(dòng)平衡校正則是產(chǎn)品品質(zhì)的前提和保障。
平衡機(jī)是這種檢測(cè)旋轉(zhuǎn)體動(dòng)平衡的檢測(cè)儀器。從構(gòu)造上講,關(guān)鍵是由機(jī)械振動(dòng)系統(tǒng)、控制器系統(tǒng)和電器設(shè)備測(cè)量系統(tǒng)等三大部件構(gòu)成。
機(jī)械振動(dòng)系統(tǒng) 關(guān)鍵作用是支承轉(zhuǎn)子,并容許轉(zhuǎn)子在轉(zhuǎn)動(dòng)時(shí)造成有規(guī)則的振動(dòng)。振動(dòng)的物理量經(jīng)傳感器測(cè)量后轉(zhuǎn)化成電信號(hào)送進(jìn)測(cè)量系統(tǒng)開展處理。
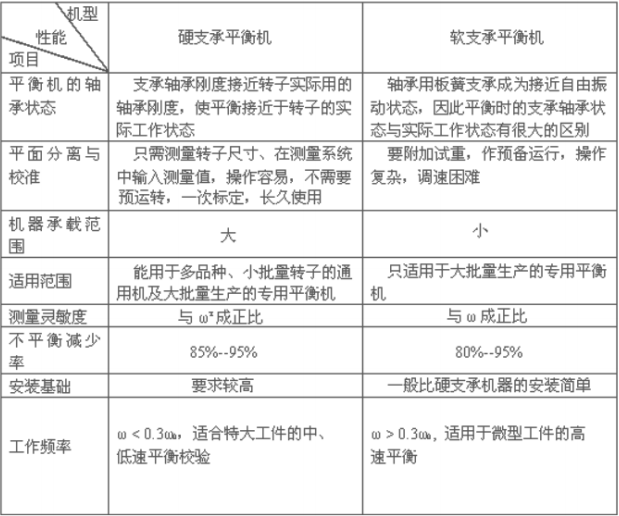
平衡機(jī)的類型許多,就其機(jī)械振動(dòng)系統(tǒng)的工作狀態(tài)歸類,現(xiàn)階段所見的無(wú)非兩類:硬支承平衡機(jī)和軟支承平衡機(jī)。硬支承平衡機(jī)指得平衡轉(zhuǎn)速遠(yuǎn)低于參振系統(tǒng)共振頻率的平衡機(jī)。而軟支承平衡機(jī)則是平衡轉(zhuǎn)速遠(yuǎn)高于參振系統(tǒng)共振頻率的平衡機(jī)。簡(jiǎn)易而言,硬支承平衡機(jī)的機(jī)械振動(dòng)系統(tǒng)剛度大,外力不可以使其隨意晃動(dòng)。軟支承平衡機(jī)的機(jī)械振動(dòng)系統(tǒng)剛度小,通常情況下,外力能夠使其隨意晃動(dòng)。下列是軟、硬支承平衡機(jī)的特性比較:
驅(qū)動(dòng)系統(tǒng) 的關(guān)鍵作用是驅(qū)動(dòng)轉(zhuǎn)子,使轉(zhuǎn)子在額定的平衡轉(zhuǎn)速下轉(zhuǎn)動(dòng)。
現(xiàn)階段普遍的驅(qū)動(dòng)系統(tǒng)關(guān)鍵有萬(wàn)向聯(lián)軸節(jié)驅(qū)動(dòng)和圈帶驅(qū)動(dòng)。萬(wàn)向聯(lián)軸節(jié)因自身構(gòu)造中存有空隙和與工件安裝時(shí)存有安裝幾何誤差,這種偏差將直接危害工件的平衡精密度,在超大工件時(shí)和心軸安裝時(shí)更加突顯。因而,萬(wàn)向聯(lián)軸節(jié)驅(qū)動(dòng)主要用于一般的、平衡精密度要求沒(méi)有很高的臥式平衡機(jī)。
在圈帶驅(qū)動(dòng)中,因?yàn)槠Ь邆錅p振功效,能降低驅(qū)動(dòng)馬達(dá)的振動(dòng)對(duì)轉(zhuǎn)子的影響,且轉(zhuǎn)子不用在平衡機(jī)上作準(zhǔn)備,也不用額外連接件如螺栓、插銷等變換固定裝置,因而安裝快速。與萬(wàn)向節(jié)驅(qū)動(dòng)對(duì)比,它找不到構(gòu)造空隙及安裝幾何誤差,能大大的提升檢測(cè)精密度。
電器設(shè)備測(cè)量系統(tǒng) 是的關(guān)鍵作用是解決由傳感器來(lái)的電信號(hào),顯視出轉(zhuǎn)子不平衡量所在的部位和大小。這是平衡機(jī)中的核心部件,其優(yōu)劣直接影響平衡機(jī)的特性。自動(dòng)定位測(cè)量系統(tǒng)是我們企業(yè)在吸收世界各國(guó)平衡機(jī)頂級(jí)技術(shù)的基本上和中國(guó)多家大中院校聯(lián)系設(shè)計(jì)制作、開發(fā)的平衡機(jī)檢測(cè)系統(tǒng),工業(yè)計(jì)算機(jī)(單片機(jī))控制系統(tǒng),選用德國(guó)、日本; 美國(guó)各種電子元器件及芯片,用優(yōu)秀的技術(shù)制作,全部產(chǎn)品均歷經(jīng)嚴(yán)格的品質(zhì)管制;保障系統(tǒng)效率高、高安全 、長(zhǎng)久穩(wěn)定運(yùn)作。
不平衡量的校正流程 ,即是以轉(zhuǎn)子上偏重的部位除掉一小部分材質(zhì),或是在轉(zhuǎn)子偏輕的部位添加一點(diǎn)平衡配重,使轉(zhuǎn)子趨于平衡的流程。不平衡量的校正一般有加料和去料兩種衡校正方式。
因?yàn)楦黝惥壒实奈:Γ承┺D(zhuǎn)子的平衡情況在應(yīng)用過(guò)程中會(huì)變化很大,對(duì)這種轉(zhuǎn)子一般還要選用加料的方式開展校正。這樣做的益處是有利于轉(zhuǎn)子(及其整機(jī))的再次校正。在不平衡量很大時(shí),去料校正顯然不如加料校正又快又好。客戶務(wù)必按照工件的詳細(xì)情況挑選有效的平衡校正方法。
平衡機(jī)的性能指標(biāo)中,有個(gè)精密度的叁數(shù):
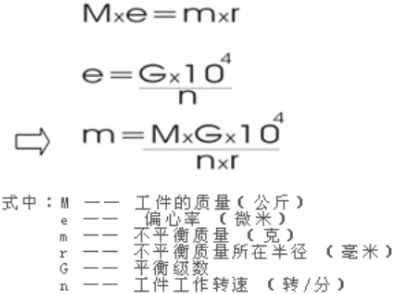
這幾條公式說(shuō)明平衡機(jī)的檢測(cè)精密度在微米的數(shù)量級(jí)以上,而工件的幾何加工精密度在 1 絲 --10 絲相互間,換句話說(shuō)在 10 微米- 100 微米之間。從這一數(shù)量級(jí)的實(shí)際含義看來(lái),轉(zhuǎn)子的平衡精密度關(guān)鍵決定于工藝軸的幾何加工精密度。
下邊就幾何偏心造成的偏差舉個(gè)簡(jiǎn)易的例子:
設(shè):轉(zhuǎn)子的質(zhì)量 M = 2000 公斤工藝軸的加工抖動(dòng)為e = 5 絲= 50 微米
轉(zhuǎn)子的校正半徑為 r = 250 毫米
那樣,由工藝軸的抖動(dòng)造成的不平衡質(zhì)量 m
m= M ×e/r= 2000 ×50/2 50 = 400 (克)
由此看來(lái) ,5 絲的精密度有這般大的影響,而 5 絲的確保現(xiàn)已有所不容易,因此平衡工藝軸的加工必須要經(jīng)過(guò)切削工藝,那樣能夠確保平衡的最后精密度意義。
平衡工藝軸的校正極限為:當(dāng)抖動(dòng)超過(guò) 5 絲時(shí),必須校正,不然平衡作用為假平衡。
不平衡合格量的計(jì)算:
依據(jù)國(guó)際標(biāo)準(zhǔn)化組織推薦,精度等級(jí)分成: G4000 、 G1600 、 G630 、 G250 、G100 、 G40 、 G16 、 G6.3 、 G2.5 、 G0.4 共 11 級(jí)。風(fēng)機(jī)、電機(jī)、膠棍的平衡精密度規(guī)定為G= 6.3 級(jí)。設(shè):轉(zhuǎn)子的品質(zhì) M=2000 公斤
轉(zhuǎn)子的修正半徑為 r =250 毫米
工件的工作轉(zhuǎn)速為 n=500 ( 轉(zhuǎn) / 分 )
精度等級(jí)采用 G=6.3 級(jí)
則不平衡合格量 m =2000x6.3x10000/250x500=1008 ( 克 )
動(dòng)平衡機(jī)的工作原理(怎樣開展測(cè)定)
平衡機(jī)是測(cè)定轉(zhuǎn)動(dòng)工件(轉(zhuǎn)子)不平衡量大小和部位的設(shè)備。何轉(zhuǎn)子在圍繞其軸線轉(zhuǎn)動(dòng)時(shí),因?yàn)橄鄬?duì)于軸線的質(zhì)量分布不均勻而造成離心力。這類不平衡離心力功效在轉(zhuǎn)子軸上會(huì)造成振動(dòng),造成噪音和加快軸承損壞,以至嚴(yán)重影響產(chǎn)品的特性和壽命。電機(jī)轉(zhuǎn)子、機(jī)床主軸、內(nèi)燃機(jī)曲軸、汽輪機(jī)轉(zhuǎn)子、陀螺轉(zhuǎn)子和鐘表擺輪等轉(zhuǎn)動(dòng)零配件在制作流程中,都必須經(jīng)過(guò)平衡才能平穩(wěn)沒(méi)問(wèn)題地運(yùn)行。 依據(jù)平衡機(jī)測(cè)出的數(shù)據(jù)對(duì)轉(zhuǎn)子的不平衡量開展修正,可改進(jìn)轉(zhuǎn)子相對(duì)于軸線的質(zhì)量分布,使轉(zhuǎn)子轉(zhuǎn)動(dòng)時(shí)造成的振動(dòng)或功效于軸承上的振動(dòng)力降低到準(zhǔn)許的范圍之內(nèi)。因而,平衡機(jī)是減少振動(dòng)、改進(jìn)特性和提高品質(zhì)的不可或缺的機(jī)器。
一般,轉(zhuǎn)子的平衡包含不平衡量的測(cè)量和校正2個(gè)流程,平衡機(jī)主要用于不平衡量的檢測(cè),而不平衡量的修正則往往借助于鉆床、銑床和點(diǎn)焊機(jī)等別的輔助機(jī)器,或用手功方式完成。一些平衡機(jī)已經(jīng)將校正裝置做變成平衡機(jī)的1個(gè)部位。重力式平衡機(jī)和離心力式平衡機(jī)是兩大類典型的平衡機(jī)。重力式平衡機(jī)通常稱之為靜平衡機(jī)。這是依靠轉(zhuǎn)子本身的重力作用來(lái)檢測(cè)靜不平衡的。。置于兩根水平導(dǎo)軌上的轉(zhuǎn)子如有不平衡量,則它對(duì)軸線的重力矩使轉(zhuǎn)子在導(dǎo)軌上滑動(dòng),直到這一不平衡量處在最底位置時(shí)才靜止。
被平衡的轉(zhuǎn)子放到用靜壓軸承支承的支座上,在支座的下邊嵌裝一塊反射鏡。當(dāng)轉(zhuǎn)子找不到不平衡量時(shí),由光源射出的光線經(jīng)此反射鏡反射后,投影在不平衡量指示儀的極坐標(biāo)原點(diǎn)。假如轉(zhuǎn)子存有不平衡量,則轉(zhuǎn)子支座在不平衡量的重力矩作用下產(chǎn)生傾斜,支座下的反射鏡也隨之傾斜并使反射出的光線偏轉(zhuǎn),那樣光線投在極坐標(biāo)指示儀上的光點(diǎn)便離開原點(diǎn)。依據(jù)這一光點(diǎn)偏轉(zhuǎn)的坐標(biāo)部位,能夠獲得不平衡量的大小和部位。
重力式平衡機(jī)僅適用于一些平衡標(biāo)準(zhǔn)不高的盤狀零部件。針對(duì)平衡需求高的轉(zhuǎn)子,通常選用離心式單面或雙面平衡機(jī)。離心式平衡機(jī)是在轉(zhuǎn)子轉(zhuǎn)動(dòng)的情況下,依據(jù)轉(zhuǎn)子不平衡造成的支承振動(dòng),或作用于支承的振動(dòng)力來(lái)檢測(cè)不平衡。其按校正平面總數(shù)的不一樣,可分成單面平衡機(jī)和雙面平衡機(jī)。單面平衡機(jī)只有檢測(cè)一個(gè)平面上的不平衡(靜不平衡) ,它雖然是在轉(zhuǎn)子旋轉(zhuǎn)時(shí)進(jìn)行測(cè)量,但仍屬于靜平衡機(jī)。雙面平衡機(jī)能測(cè)量動(dòng)不平衡,也可以分別檢測(cè)靜不平衡和偶不平衡,通常稱之為動(dòng)平衡機(jī)。離心力式平衡機(jī)按支承特點(diǎn)不一樣,又可分成軟支承平衡機(jī)和硬支承平衡機(jī)。平衡轉(zhuǎn)速高過(guò)轉(zhuǎn)子一支承系統(tǒng)固有頻率的稱之為軟支承平機(jī)。這類平衡機(jī)的支承剛度小,傳感器測(cè)量出的信號(hào)與支承的振動(dòng)偏移成正比。平衡轉(zhuǎn)速低於轉(zhuǎn)子一支承系統(tǒng)固有頻率的稱之為硬支承平衡機(jī),這類平衡機(jī)的支承剛度大,傳感器測(cè)量出的信號(hào)與支承的振動(dòng)力成正比。
平衡機(jī)的關(guān)鍵特性用很小能達(dá)剩下不平衡量,和不平衡量減少率兩項(xiàng)綜合指標(biāo)表達(dá)。前者是平衡機(jī)能使轉(zhuǎn)子超過(guò)的剩下不平衡量的最小值,這是衡量平衡機(jī)最大平衡能力的指標(biāo);后者是經(jīng)過(guò)一次校正后所降低的不平衡量與原始不平衡量比為,這是衡量平衡效率的指標(biāo),通常用百分?jǐn)?shù)表示。
在當(dāng)代機(jī)械設(shè)備中,因?yàn)閾闲赞D(zhuǎn)子的廣泛應(yīng)用,人們研發(fā)出了撓性轉(zhuǎn)子平衡機(jī)。這種平衡機(jī)務(wù)必在轉(zhuǎn)子工作轉(zhuǎn)速范圍內(nèi)進(jìn)行無(wú)極變速;除能檢測(cè)支承的振動(dòng)或振動(dòng)力外,還能檢測(cè)轉(zhuǎn)子的撓曲變形。撓性轉(zhuǎn)子平衡機(jī)有時(shí)安裝在真空防護(hù)室內(nèi),以合適汽輪發(fā)電機(jī)這類轉(zhuǎn)子的平衡,它配備有抽真空系統(tǒng)、潤(rùn)滑系統(tǒng)、潤(rùn)滑油除氣系統(tǒng)和數(shù)據(jù)處理用計(jì)算機(jī)軟件等龐大的輔助設(shè)備。
依據(jù)工業(yè)化生產(chǎn)的須要,對(duì)特殊的轉(zhuǎn)子能自動(dòng)進(jìn)行平衡檢測(cè)和平衡校正的全自動(dòng)平衡機(jī),及其平衡自動(dòng)線,當(dāng)代已大量的裝備在汽車制造、電動(dòng)機(jī)制造等產(chǎn)業(yè)部門。
相關(guān)新聞
2024-07-03
平衡機(jī)發(fā)展迄今已經(jīng)有一百多年的歷史。1866年,德國(guó)西門子公司發(fā)明了發(fā)電機(jī)。4年后,加拿大人Henry Martinson申請(qǐng)了平衡技術(shù)的專li ,拉開了平衡校正產(chǎn)業(yè)的序幕。
2024-07-03
電機(jī)轉(zhuǎn)子做動(dòng)平衡需注意的安全操作事宜
電機(jī)轉(zhuǎn)子裝配工的一般操作規(guī)程如下: 1、工作前,整理場(chǎng)地,放穩(wěn)各零、部件,并檢查裝配使用工具和工作環(huán)境是否安全良好。 2、吊放電機(jī)機(jī)座、底板、定子、轉(zhuǎn)子、軸承等大型部件時(shí)必須放好方箱或墊木...
2024-07-03
膠輥動(dòng)平衡機(jī)客戶現(xiàn)場(chǎng)
主要應(yīng)用于各類家用電器、散熱風(fēng)扇、電機(jī)轉(zhuǎn)子、發(fā)電機(jī)轉(zhuǎn)子、水泵轉(zhuǎn)子、汽車、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
2024-07-03
你還在用傳統(tǒng)平衡機(jī),看看卓玄金高新技術(shù)平衡機(jī)吧
廣州卓玄金機(jī)械設(shè)備有限公司-專業(yè)動(dòng)平衡機(jī)制造商 各類平衡機(jī)為您量身定制 ?免費(fèi)上門安裝調(diào)試 長(zhǎng)年保修
2024-07-03
主要應(yīng)用于各類家用電器、散熱風(fēng)扇、電機(jī)、發(fā)電機(jī)、水泵、汽車、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
廣州卓玄金機(jī)械設(shè)備有限公司
傳真:020-36969822
地址:廣東省廣州市花都區(qū)大華大街34號(hào)(廣州卓玄金機(jī)械設(shè)備有限公司)
注我們")
關(guān)注我們
Copyright ? 2022 廣州卓玄金機(jī)械設(shè)備有限公司
械設(shè)備有限公司")
關(guān)鍵詞: 全自動(dòng)系列 智能定位系列 自驅(qū)動(dòng)整機(jī)系列 通用型系列